Rosbag gyakorlás
Tartalom
- Előkészületek, rosbag visszajátszása
- Topicok elérése - terminalból
- Topicok elérése - rqt_plot
- Topicok elérése - rviz
- Topicok elérése - saját python kóddal
Videó
A gyakorlat a jobb érthetőség és az otthoni feldolgozás miatt akár videóként is megtekinthető. A videó szöveges magyarázat nélküli, rövidített, cserébe mutatja a parancsok kiadásától elvárható működést: youtu.be/Hu7YseOh3qk
Előkészületek
A következő példák egy Turtlebot3 robot és egy Nissan Leaf önvezető autó .bag fájlait használják majd. A .bag az ROS log fájtípusa, méréseket mentésére, visszajátszására, szerkeztésére stb. szolgál.

Nyissunk egy terminált (ctr+alt+t), hozzunk létre egy rosbag-gyak mappát, majd lépjünk bele.
mkdir ~/rosbag-gyak
cd ~/rosbag-gyak
Töltsük le a 2 rosbag fájlt.
wget www.sze.hu/~herno/PublicDataAutonomous/turtlebot-2019-03-11-SLAM-no-camera.bag
wget www.sze.hu/~herno/PublicDataAutonomous/leaf-2019-03-13-a-no-lidar.bag
Vizsgáljuk meg, hogy tényleg ~46MB méretű-e Turtlebot és ~9MB méretű-e a Leaf .bag fájl.
ls --size
ls --size --block-size=M
ls -l --block-size=M
Nézzük meg a következő videót, ez a Turtlebot .bag fájl rögzítésekor készült: youtu.be/QwagQFvhbNU
Megjegyzés: www.sze.hu/~herno/PublicDataAutonomous linken további .bag fájlok találhatóak.
A terminalban indítsunk egy roscore-t. Később leááítható ctr + c segítségével.
roscore
Nyissunk egy újabb tabot a terminálban (ctr+shift+t). Ha nem rosbag-gyak-ban lennénk, cd-zzünk. A -l kapcsoló loopolja a bag-et, a play mondja meg, hogy lejátszuk és nem például rögzítjük a bag-et.
cd ~/rosbag-gyak
rosbag play -l turtlebot-2019-03-11-SLAM-no-camera.bag
Később ugyanígy játszhatjuk le a leaf-2019-03-13-a-no-lidar.bag-et is.
Topicok terminalból
Nyissunk egy újabb tabot a terminálban (ctr+shift+t), majd vizsgáljuik meg a topicokat.
rostopic list
Ezt kellene látnunk.
/battery_state
/clock
/cmd_vel
/cmd_vel_rc100
/constraint_list
/diagnostics
/firmware_version
/flat_imu
/imu
/joint_states
/landmark_poses_list
/magnetic_field
/map
/move_base/TebLocalPlannerROS/parameter_descriptions
/move_base/TebLocalPlannerROS/parameter_updates
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/global_costmap/inflation_layer/parameter_descriptions
/move_base/global_costmap/inflation_layer/parameter_updates
/move_base/global_costmap/obstacle_layer/parameter_descriptions
/move_base/global_costmap/obstacle_layer/parameter_updates
/move_base/global_costmap/parameter_descriptions
/move_base/global_costmap/parameter_updates
/move_base/global_costmap/static_layer/parameter_descriptions
/move_base/global_costmap/static_layer/parameter_updates
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base/local_costmap/footprint
/move_base/local_costmap/inflation_layer/parameter_descriptions
/move_base/local_costmap/inflation_layer/parameter_updates
/move_base/local_costmap/obstacle_layer/parameter_descriptions
/move_base/local_costmap/obstacle_layer/parameter_updates
/move_base/local_costmap/parameter_descriptions
/move_base/local_costmap/parameter_updates
/move_base/parameter_descriptions
/move_base/parameter_updates
/move_base/status
/odom
/rosout
/rosout_agg
/rpms
/scan
/scan_matched_points2
/sensor_state
/submap_list
/tf
/tf_static
/trajectory_node_list
Vizsgáljunk meg minél több topicot rostopic type illetve rosmsg show-val. A rostopic type /odom parancs hatására megtudhatjuk az /odom topic típusát, ami nav_msgs/Odometry. Ha ki akarjuk deríteni a nav_msgs/Odometry felépítését a rosmsg show nav_msgs/Odometry-re lesz szükségünk. A két parancsot kényelmesebb egybe kiadni, az első parancs kimenete lesz a második eleje egy |- karakter segítségével, az egész egyben pedig így néz ki:
rostopic type /odom | rosmsg show
Erre megkapjuk, ugyanazt, mint a rosmsg show nav_msgs/Odometry-val, is kapunk, tehát az odometria üzenet felépítését.
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
float64[36] covariance
Vizsgáljunk meg minél több topicot rostopic echo-val. Leállítás ctr + c
rostopic echo /odom
header:
seq: 22203
stamp:
secs: 1552323858
nsecs: 875916038
frame_id: "odom"
child_frame_id: "base_footprint"
pose:
pose:
position:
x: -0.379863917828
y: 0.126037299633
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.485380351543
w: 0.874303102493
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
twist:
twist:
linear:
x: 0.151097133756
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0535195507109
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
rqt_plot
Indítsuk az rqt_plot-ot terminalbol, adjuk hozzá például az /imu/linear_acceleration topciot. Megjegyzés: az rosbag visszajátszásánál nem állítottuk be, hogy időt generáljon (pedig lehetne), de így a mérés a ploton újrakezdődhet.
rosrun rqt_plot rqt_plot
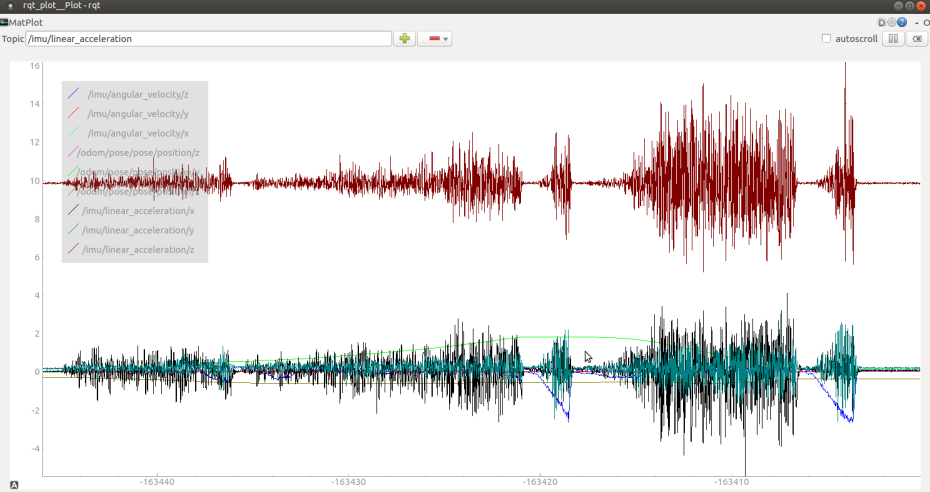
További információ: wiki.ros.org/rqt_plot
rviz
Indítsuk az rviz-t.
rosrun rviz rviz
Adjunk hozzá különböző topicokat: Add » By topic » Kiválaszt » Ok. Például így nézzen ki:
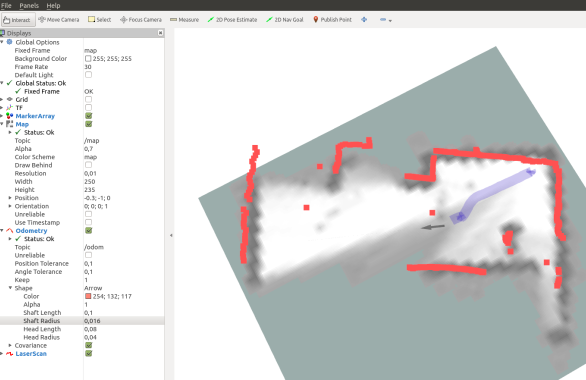
További információ: wiki.ros.org/rviz
python
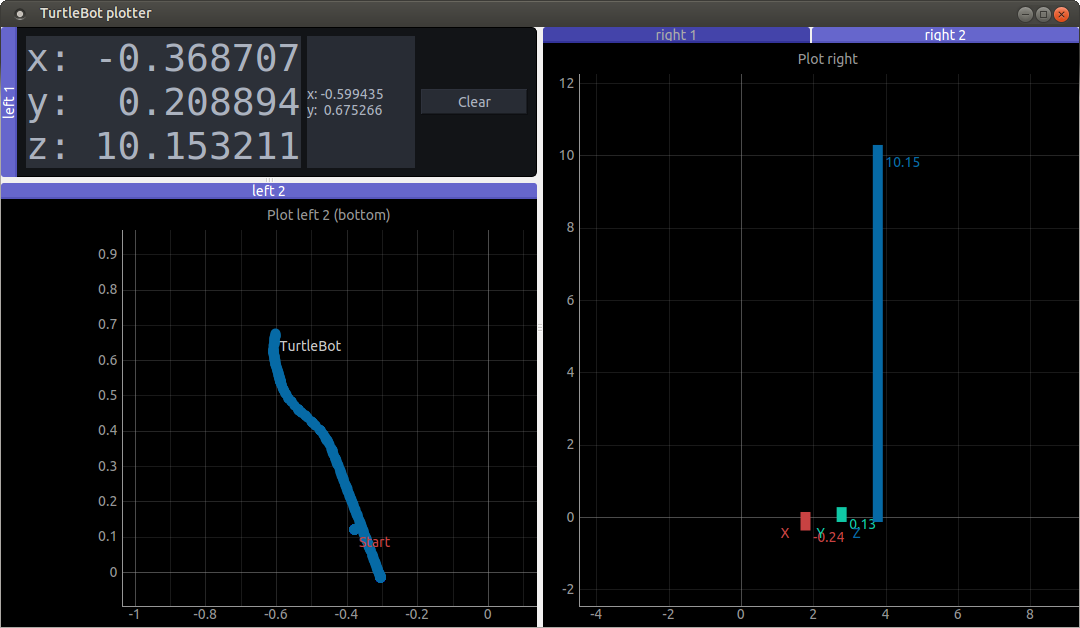
A következőkben a listenerTurtle.py segítségével feliratkozunk az /odom és az /imu topicokra és első körben kiíratjuk az odom x és y pozícióját, valamint az imu lineáris gyorsulásait. Anonymous módon feliratkozunk a két topcira, listener névvel (a név gyakolratilag mellékes). Két úgynevazett callback fügvényt használunk a feliratkzáshoz.
import rospy
import std_msgs.msg as rosmsg
import nav_msgs.msg as navmsg
import sensor_msgs.msg as senmsg
def odometryCallBack(msg):
print("odom(x,y): %8.4f %8.4f " % (msg.pose.pose.position.x, msg.pose.pose.position.y))
def imuCallBack(msg):
print("imu(xyz): %8.4f %8.4f %8.4f" % (msg.linear_acceleration.x, msg.linear_acceleration.y, msg.linear_acceleration.z))
rospy.init_node("listener", anonymous=True)
rospy.Subscriber("/odom", navmsg.Odometry, odometryCallBack)
rospy.Subscriber("/imu", senmsg.Imu, imuCallBack)
rospy.spin()
Ha nem szeretnénk klónozni a teljes repository-t, akkor wget-tel is letölthetjük a listenerTurtle.py-t, a plotterLeaf.py-t és a plotterTurtle.py-t.
wget https://raw.githubusercontent.com/horverno/ros-gyakorlatok/master/1-rosbag-es-topicok/listenerTurtle.py
wget https://raw.githubusercontent.com/horverno/ros-gyakorlatok/master/1-rosbag-es-topicok/plotterTurtle.py
wget https://raw.githubusercontent.com/horverno/ros-gyakorlatok/master/1-rosbag-es-topicok/plotterLeaf.py
A plotterTurtle.py és a plotterLeaf.py hasonló az előzőhöz, de terminal helyett GUI-ba írja az adatokat. A pyqt és a pyqtgraph segítségével felhasználói felületeket készíthetünk, amiket nem csupán scripként, de futtatható állományként, vagy akár telepítőként is használhatunk. Első lépésként ellenőrizzük, hogy telepítve vannak-e a szükséges package-k, a következő importokkal:
import PyQt5
import pyqtgraph
Amennyiben ModuleNotFoundError-t kapunk telepítsük a két package-t:
sudo apt install python3-pip
pip3 install numpy rospkg pyqt5 pyqtgraph PyYaml
Vagy python 2:
sudo apt install python-pip
pip install pyqt5 pyqtgraph
A Nissan leaf helyzetét több fajta módon is számíthatjuk. Lehet a bicikli kinematikai modellel és lehet a GPS alapján. A gépjármű-szerű (négy kerékkel rendelkező, első tengelyen kormányozható) robot egyszerűsített kinematikai leírására használhatjuk a bicikli modellt, ami könnyen szmolható, azonban az idő függvényében egyre nagyobb pontatlansága lesz. Ez a /leaf/odom topicon érhető el a Leaf .bag fájl visszajátszásával. A GPS pozíció magától érthetődőbb, szerencsére a mérés során egy különlegesen pontos GPS-t használtunk, ez a /gps/odom topicon érhető el. Vizualizáljuk a két topicot a plotterLeaf.py segítségével.
python plotterLeaf.py

Sokkal összetetteb dolgot is megvalósíthatunk a Turtlebot .bag fájl visszajátszásával. Itt nagyon sok topicot vizualizálhatunk.
Vizsgáljuk meg a fájokat VS code segítségével (cd ~/rosbag-gyak, ha nem ott lennénk)
code .
Ez egy VS code környezetet nyit meg, az aktuális mappával, majd visszaadja a terminal prompt-ot.
Kezdőoldal
GitHub Pages kezdőoldal: horverno.github.io/ros-gyakorlatok